

 所有产品
所有产品 相关新闻
相关新闻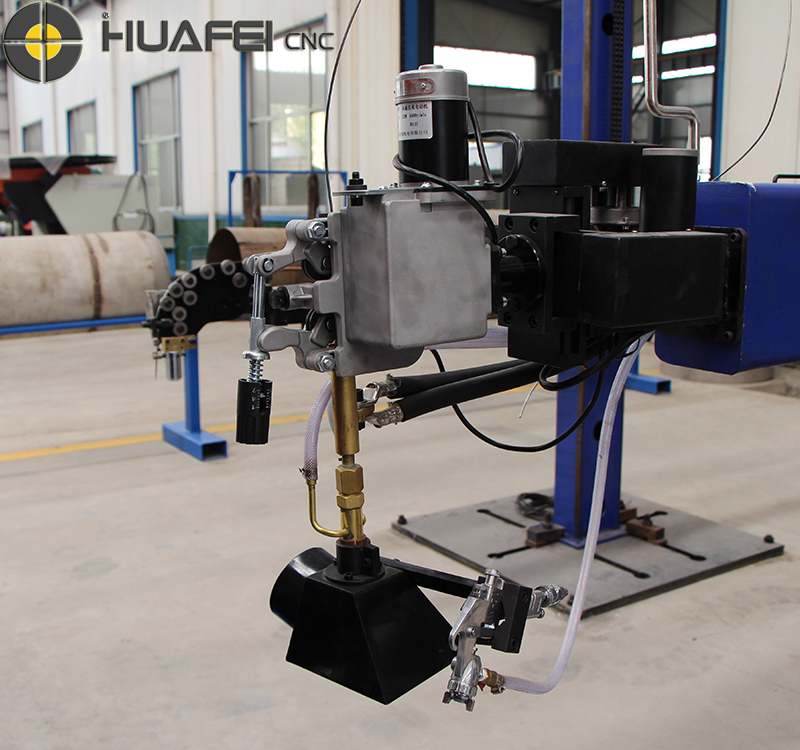
1.各相关运动部位及导轨与滚轮应涂润滑油脂,闭式传动部位应注润滑油,坚持部位运动灵敏。
2、常常查看整理导轨、滑架、滑架丝杆及螺母等运动部位,避免积尘、散落焊剂及其他杂物,影响运动部位的灵敏运动。不允许碰撞,磨损各运动给合面。
3、每月一次查看提高链条、防坠滚了、立柱滚轮、横梁滚轮等要害运动部件磨损整理及合作间隙。如发现问题及时调整、修理、更换,提高链条及衔接销等易损件。每年有必要拆下查看一次,及时处理。
4、常常查看各行程开关,动作灵敏性、牢靠性以及机械保护块是否松动、损坏。
5、常常查看电路接头,坚持衔接结实,衔接牢靠。
6、一个月一次用压缩空气吹扫电控柜、控制盒内的尘土,使继电器、按钮、开关等坚持清洁和杰出的触摸,避免误操作。
7、所有减速机在运用之前都有必要查看减速机内是否加注有润滑油,未加注润滑油禁止运用。
8、每季度查看一次减速机油量、滚轮、防坠转轴、链条等运动会部件润滑油脂状况,如有缺乏应立即补充增加。
焊接操作机的基本安全操作规程:
1.装置方式:包含落地式装置、墙面式装置和倒挂式装置等几种;
2.控制轴数:2轴、3轴、4轴、5轴、6轴、7轴等多种;
3.最大有效载荷:依据手臂承载才能选择不同载荷才能的机器人;
4.重复定位精度:±0.01mm;
5.驱动体系:气动、液压、直流伺服体系、沟通伺服体系等等;
6.方位反应类型:绝对编码器和增量式编码器;
7.手臂移动范围:决议机器人运动空间;
8.各轴移动速度:决议机器人作业效率。
机器人对装置环境的要求包含:
1.环境温度要求:作业温度0~45℃,运输贮存温度-10~60℃;
2.相对湿度要求:20~80%RH;
3.动力电源:3相AC200/220V(+10%~-15%);
4.接地电阻:小于100Ω;
5.机器人作业区域需有防护办法(安全围栏);
6.尘埃、泥土、油雾、水蒸气等有必要坚持在最小限度;
7.环境有必要没有易燃、易腐蚀液体或气体;
8.设备装置要求要远离碰击和震源;
9.机器人邻近不能有强的电子噪声源;
10.震动等级有必要低于0.5G(4.9m/s2)。


 华飞数控服务热线:18653180816
华飞数控服务热线:18653180816
 重点产品分类
重点产品分类


 18653180816
18653180816 jnhfsk@126.com
jnhfsk@126.com 济南市历城区华山开发区同华路12号
济南市历城区华山开发区同华路12号


 微信在线询价
微信在线询价